Background
This project is aimed to build a simulator for ICRA RoboMaster AI Challenge. Through the simulator, a lot of Deep Reinforcement Learning algorithms can be tested and train a good policy for the competition. It may also require transfer learning to overcome the gap between sim to real.
Features
- Multi-agent navigation based on multi-jackle ROS package.
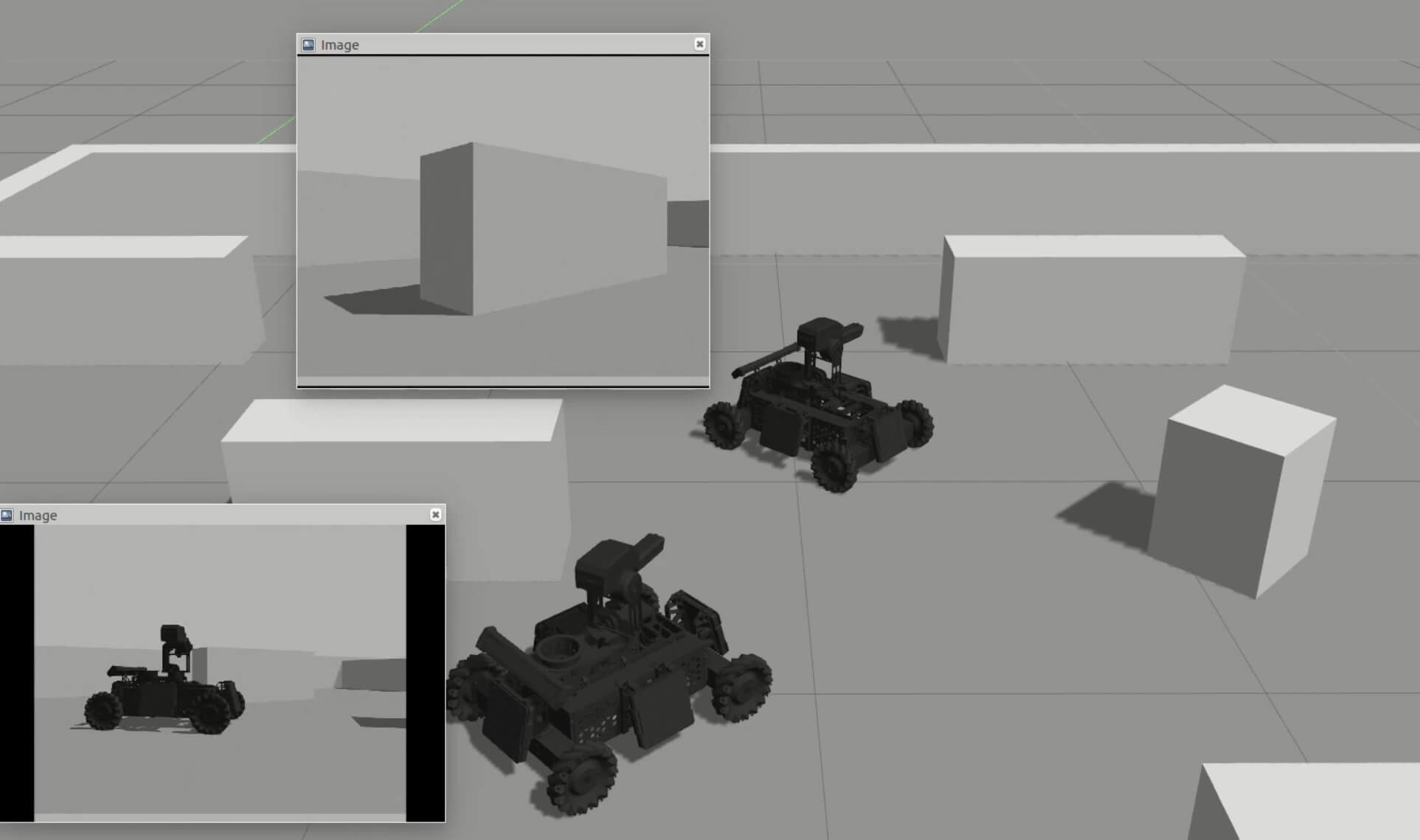
- Omni-directional chassis combine with RoboRTS.
- Rotatable turret with a camera on the robot model.
- Connect gazebo with OpenAi gym framework by openai_ros ROS package.
- Speed up the gazebo simulation.
- Referee system based on the competition’s rule.
- Custom Debuff layer was added to avoid the debuff zone in the arena.
Project Video
Project Code
https://privilger.github.io/RoboMaster-Simulator